Source Code: GitHub
This project was for my Senior Design I and II classes. I and four others entered the annual IEEE Region 5 Robotics
Competition. The competition itself took place in early April in Fayetteville, AR. The goal of the competition was
to have a fully autonomous low-powered robot capable of navigating a course at the same time against other
competitors, outlasting and overtaking their robots. The real challenge was that the robot had to be powered on a
supercapacitor that had to be initially charged by a wireless Qi charger at the start of each round, with the
option of charging throughout the round at various charging stations. My team ended up placing first in the
competition, outlasting every other robot in the competition by using low powered components with clever algorithms
to minimize power consumption.
This page is temporary, as a standalone detailed page is currently being written: bb-uta.com
Here is a link to the competition ruleset: rrosal.com/files/ieee/2024-robotics-rules.pdf
The source code for the robot is available at the GitHub link above.
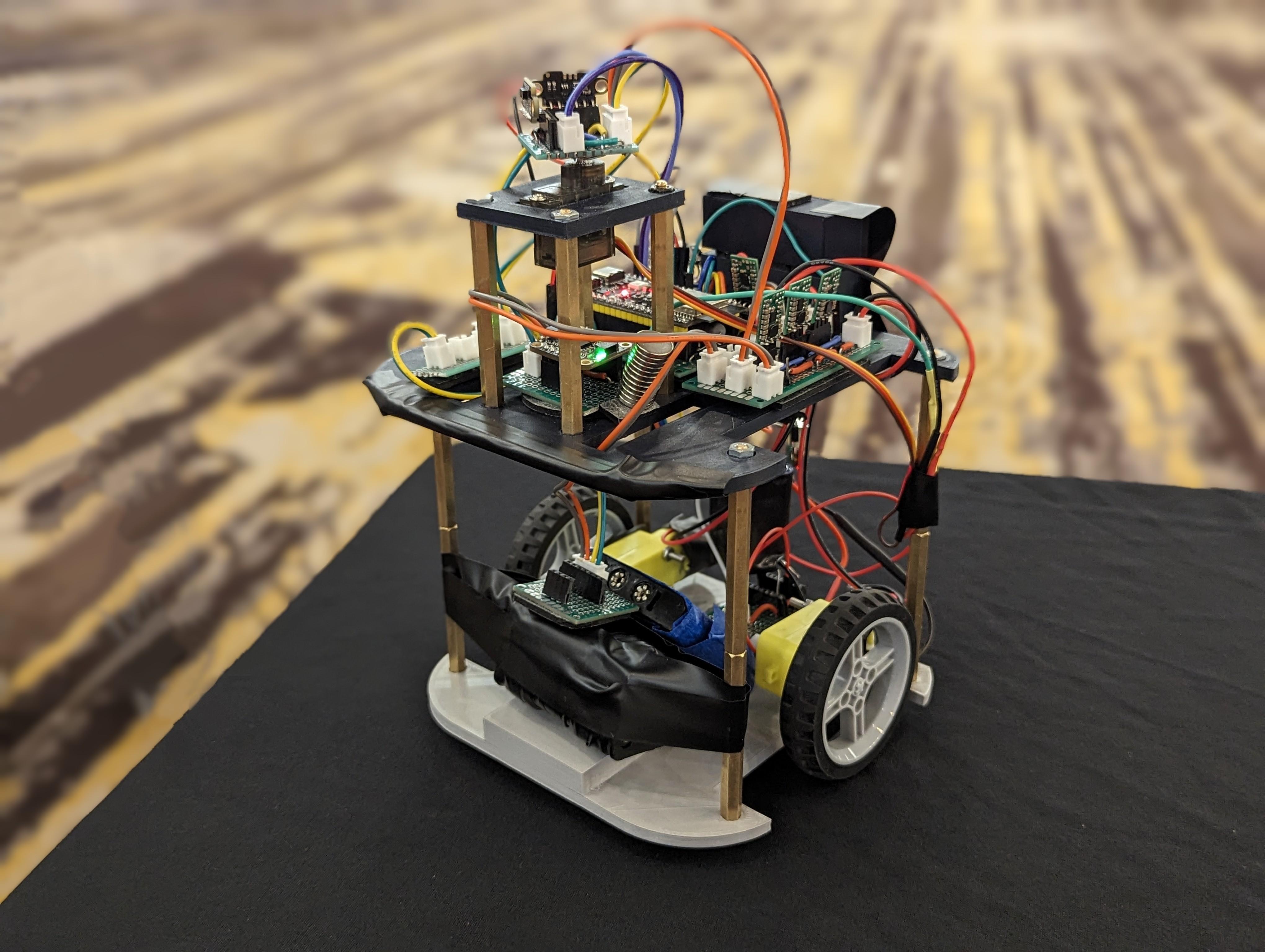
For this project, I worked on one of the requirements being a wireless remote for starting and stopping the robot. I
did this using an IR sensor + TV remote. I also worked on the robot's initial sleep state, turning off all of the
peripherals and setting the microcontroller (an ESP32-S3) to sleep on startup as to minimize power consumption while
charging. The robot would exit the sleep state once the IR remote sent the correct signal to start the robot. I also
worked on selecting the supercapacitor to be used by the robot, testing various supercapacitors and seeing their
charge and discharging characteristics in order to find the best one for our robot. I was also the one that did the
physical construction of the robot, designing all of the circuits that went on blank protoboards and soldering them.
The chassis was created in Solidworks by another team member, but with close collaboration with me to make sure all
of the components fit and worked properly.